欢迎访问武汉索尔德测控技术有限公司的网站
欢迎访问武汉索尔德测控技术有限公司的网站

- 公司名称:武汉索尔德测控技术有限公司
- 联系人:吴经理
- 手机:13277934095
- 公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
堆取料无人操作系统


- 产品名称:福建斗轮堆取料机无人化操控系统_自动化成套控制系统-武汉索尔德测控技术有限公司
- 产品价格:3000.00
- 产品数量:100
- 保质/修期:1
- 保质/修期单位:年
- 更新日期:2021-07-10
产品说明
并实时更新数据库内数据内容,同时数据库数据内容的变化触发三维成像控件从数据库读取一次数据,从而实现终端显示的三维料场图像实时动态更新.具体的说:数据预处理的过程是,堆取料机实时运动状态数据是通过堆取料机的走行、俯仰、回旋刻度标尺输出的走行值、俯仰角度、回旋角度获得,堆取料机悬臂的动作反应在俯仰角度、回旋角度的变化上;激光扫描装置采集的数据是发射光心在0到180度范围内,周期性的以每0.5度或0!25度发射角度间隔发射光束,通过测量发射光束与料堆表面反射光束的时间差得出激光扫描装置发射光心到料堆反射表面空间距离;激光扫描装置安装相对位置数据是激光扫描装置到俯仰轴的距离,俯仰角度在零度时激光扫描装置相对于地面的高度;堆取料机实时运动状态数据与激光扫描装置采集的数据在时间上实现同步匹配!
GNSS三维坐标位置检测系统可提供堆取料机走行定位系统输出的走行值;根据当前时刻激光扫描数据与堆取料机走行定位系统的位置信息产生对应关系,将当前时刻料堆表面被测点的一组数据从激光扫描装置坐标系下转换成料场坐标系下;在料场坐标系下,料堆表面一个被测点坐标值中的x、y值为被测点在料场平面的两维坐标位置,被测点Z值为对应此x、y值时被测点的高度值.网格规范化处理过程是,对激光扫描装置采集的所有测量点坐标值进行均匀网格化处理,即在料场平面坐标下,在料场长度和宽度范围内沿轨道方向即Y轴、和沿垂直轨道方向即X轴,每间隔一定距离对整个料场进行等分,这样在料场的有效堆放范围内形成一个个大小面积相等均匀分布的网格,实现料场的数字化分割;对测量点落在网格中的点数量进行规范化整合处理,保证每个网格只对应一个坐标值;如果落在同一网格内有多个测量点数据,则对这些测量点的高度Z求平均值作为网格点的Z值,且规定网格点的x、y坐标为每个网格中心,最后以新坐标点作为落在此网格内的测量点坐标;规范化处理后的网格在数学上可以表示为一个矩阵,在计算机实现中则是一个二维数组;每个网格单元或数组的一个元素,对应一个高度值!
堆取料机走行、俯仰、回旋刻度标尺的数据刷新与激光扫描装置的数据刷新两者的数据匹配原则是以激光扫描数据的时间为准,用接近该时间的刻度标尺数据去匹配激光扫描数据,这样每个时刻激光扫描数据都与刻度标尺的信息建立了对应关系!数据坐标化处理过程是,首先以激光扫描装置为原点建立坐标系,某一时刻来自激光扫描装置的距离值和对应的发射角度值放入此坐标系下;随后对应料场建立料场坐标系,沿堆取料机走行轨道方向作为Y轴,平行料场地面并垂直轨道方向为X轴,垂直料场地面方向为Z轴;料场坐标系的原点与堆取料机走行值的原点重合,以堆取料机俯仰轴中心作为相对基点;安装于堆取料机悬臂上的激光扫描装置在当前时刻在料场坐标系下的空间坐标光扫描装置到相对基点的空间距当前时刻俯仰刻度标尺输出的俯仰角度值,回转刻度标尺输出的回转角度值,激光扫描装置在俯仰角度为0度时相对于地面的高度.
武汉索尔德测控技术有限公司,位于武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室。公司主营自动化成套控制系统行业,如何了解{推广产品}产品信息详情请拔打热线:13277934095经理。
福建斗轮堆取料机无人化操控系统
目前,我国的散货(矿石、煤等)料场主要采取斗轮式取料机进行取料作业,尤其是在大型散货码头,原料的大量需求造就了巨型的堆场,这就要求有一定数量的取料设备来进行生产,同时需配备相应数量的操作司机来驾驶这些设备。因此,如何提高取料效率、改善作业环境、降低劳动强度,降低人工成本、减少人工干预造成的效率降低就成了所有大型散货码头面临的共同课题。散货取料装船流程的效率高低,是直接制约港口装船疏港效率的主要环节,智能化取料研究与应用,就是针对取料机现有的作业模式和取料工艺进行研究,通过对取料机PLC程序及上位机软件进行合理优化和二次开发,并借助前沿的设备和技术手段以实现取料机机智能化提高的同时,提高作业效率,并兼顾人力成本的节省。
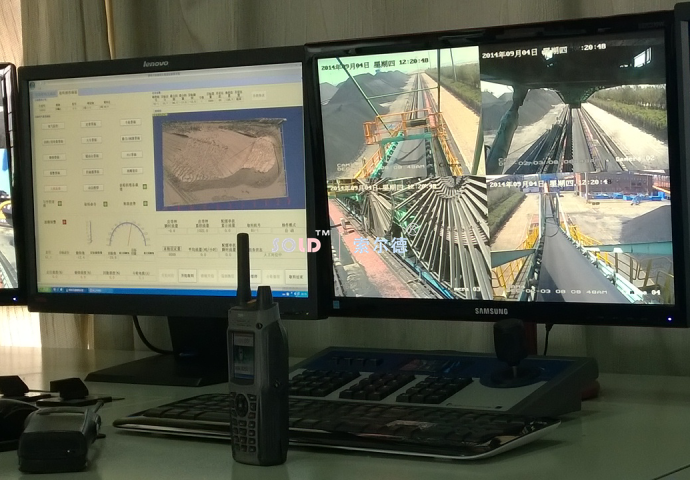
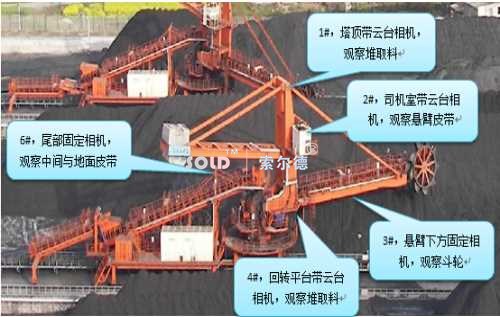
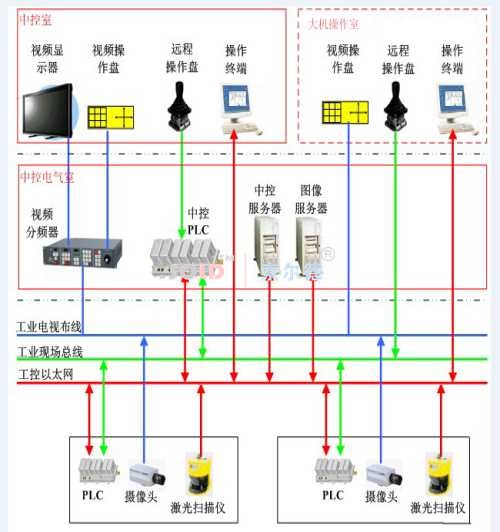
本项目具有以下现实意义:改善劳动环境和降低劳动强度减少人为因素的影响和人力投入提高堆、取料机的自动化作业程度并稳定生产运行提高码头整体智能化作业管理水平保持行业技术前沿性.对于单机全自动系统而言,全自动化的硬件控制设备都在堆取料机中,主要包括PLC、激光料堆扫描,实时大机行走定位,俯仰角测量,旋臂角度测量各类辅助装置等;料堆扫描装置完成料堆原始三维数据及预处理,通过处理后的数据形成实时的模型;根据对取料机控制策略,完成斗轮堆取料机自动作业;堆取料机异常状态检测,防止碰撞、过载等异常情况的发生;控制中心设置人工干预装置如手柄操作盘等,当堆取料机工作出现异常时,可以进行人工干预,主要包括停机,暂停堆取料、大车后退、大臂旋转等操作;单机PLC作为控制中心,需根据主控PLC传送过来的堆取料任务的范围,实现堆取料的逻辑控制及其操作的实现!

静海索尔德物流管理系统厂家客服_冷轧车间自动化成套控制系统-武汉索尔德测控技术有限公司
实现料堆实时动态跟踪的三维成像方法,是利用堆取料机的走行、俯仰、回旋运动,带动安装在堆取料机悬臂前方的激光扫描装置对料堆进行动态扫描,对获得的激光扫描数据进行预处理、坐标转化、网格规范化处理、插值处理后生成规则的三维数据,生成整个料场的完整网格数据库;由三维成像控件从数据库中读出料场网格坐标信息,以料场为图像显示区域、料场地面为显示基面,实现区域内的坐标还原,完成料堆三维图像显示;高密度数据的快速采集在操作过程中,每秒可获得料堆10次以上轮廓;高速度的数据处理与分析,数据处理由计算机快速自动完成;简易的三维图形操作系统实现被测目标的立体重现,并能够进行图形的旋转、平移和局部放大等交互操作,测量结果一目了然.
供应商信息
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
联系人:吴经理
手机:13277934095
注册时间: 2014-12-09
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
联系人:吴经理
手机:13277934095
注册时间: 2014-12-09