 欢迎访问海南锦旭网络有限公司的网站
欢迎访问海南锦旭网络有限公司的网站

- 公司名称:海南锦旭网络有限公司
- 联系人:高小波
- 手机:15530122586
- 公司地址:海南省海口市龙华区金宇街道坡博路8号B栋椰港创业基地201-K53
机器人系统
- 您当前的位置:
- 首页>
- 产品中心 >机器人系统 >全新机器人系统原理_关于机器人系统研发_海南锦旭网络有限公司
- 产品名称:全新机器人系统原理_关于机器人系统研发_海南锦旭网络有限公司
- 产品价格:面议
- 产品数量:1
- 保质/修期:1
- 保质/修期单位:年
- 更新日期:2024-03-12
产品说明
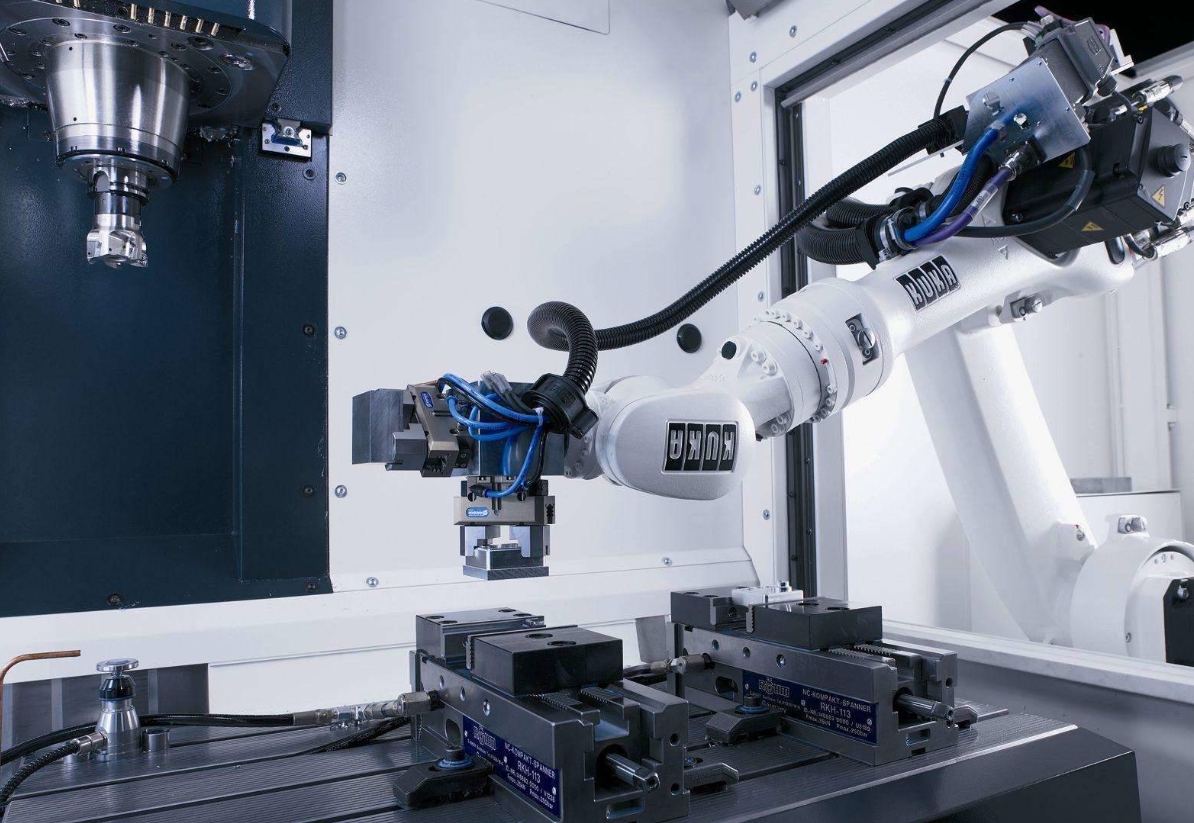
c.自立型机器人。在设计制作之后,机器人无需人的干预,能够在各种环境下自动完成各项拟人任务.机器人系统是由机器人和作业对象及环境共同构成的,其中包括机械系统、驱动系统、控制系统和感知系统四大部分。机械系统工业机器人的机械系统包括机身、臂部、手腕、末端操作器和行走机构等部分,每一部分都有若干自由度,从而构成一个多自由度的机械系统。此外,有的机器人还具备行走机构.若机器人具备行走机构,则构成行走机器人;若机器人不具备行走及腰转机构,则构成单机器人臂!
2)RIA分类法!美国机器人协会将JIRA分类法中的后四种机器当做机器人!按机器人的智能程度分类1)一般机器人.不具有智能,只具有一般编程能力和操作功能.2)智能机器人.具有不同程度的智能,又可分为:a.传感型机器人。具有利用传感信息(包括视觉、听觉、触觉、接近觉、力觉和红外、超声及激光等)进行传感信息处理,实现控制与操作!b!交互型机器人!机器人通过计算机系统与操作员或程序员进行人机对话,实现对机器人的控制与操作!
高品质全新机器人系统原理
海口AI项目应用_工业AI项目研发_海南锦旭网络有限公司
我们推荐全新机器人系统原理
末端操作器是直接装在手腕上的一个重要部件,它可以是两手指或多手指的手爪,也可以是喷漆枪、焊枪等作业工具。工业机器人机械系统的作用相当于人的身体(如骨髓、手、臂和腿等)!驱动系统驱动系统主要是指驱动机械系统动作的驱动装置!根据驱动源的不同,驱动系统可分为电气、液压和气压三种以及把它们结合起来应用的综合系统.该部分的作用相当于人的肌肉.无论电气还是液压驱动的机器人,其手爪的开合都采用气动形式。气压驱动机器人结构简单、动作迅速、价格低廉,但由于空气具有可压缩性,其工作速度的稳定性较差.
机器人的分类方法很多!这里首先介绍i种分类法,即按机械手的几何结构、机器人的控制方式以及机器人的信息输入方式。按机械手的几何结构分类机器人机械手的机械配置形式多种多样!常见的结构形式是用其坐标特性来描述的。这些坐标结构包括笛卡儿坐标结构、柱面坐标结构、极坐标结构、球面坐标结构和关节式球面坐标结构等.这里简单介绍柱面、球面和关节式球面坐标结构三种常见的机器人.按机器人的控制方式分类按照控制方式可将机器人分为非伺服机器人和伺服控制机器人两种。
该部分主要由计算机硬件和控制软件组成。软件主要由人与机器人进行联系的人机交互系统和控制算法等组成!该部分的作用相当于人的大脑.感知系统感知系统由内部传感器和外部传感器组成,其作用是获取机器人内部和外部环境信息,并把这些信息反馈给控制系统。内部状态传感器用于检测各关节的位置、速度等变量,为闭环伺服控制系统提供反馈信息.外部状态传感器用于检测机器人与周围环境之间的一些状态变量,如距离、接近程度和接触情况等,用于引导机器人,便于其识别物体并做出相应处理。
供应商信息
海南锦旭网络有限公司
其他未分类
公司地址:海南省海口市龙华区金宇街道坡博路8号B栋椰港创业基地201-K53
企业信息
联系人:高小波
手机:15530122586
注册时间: 2023-08-14
其他未分类
公司地址:海南省海口市龙华区金宇街道坡博路8号B栋椰港创业基地201-K53
企业信息
联系人:高小波
手机:15530122586
注册时间: 2023-08-14