欢迎访问东莞宏图仪器有限公司的网站
欢迎访问东莞宏图仪器有限公司的网站

- 公司名称:东莞宏图仪器有限公司
- 联系人:刘小姐
- 手机:13925785819
- 公司地址:广东省东莞市清溪镇大利鹿湖东路53号
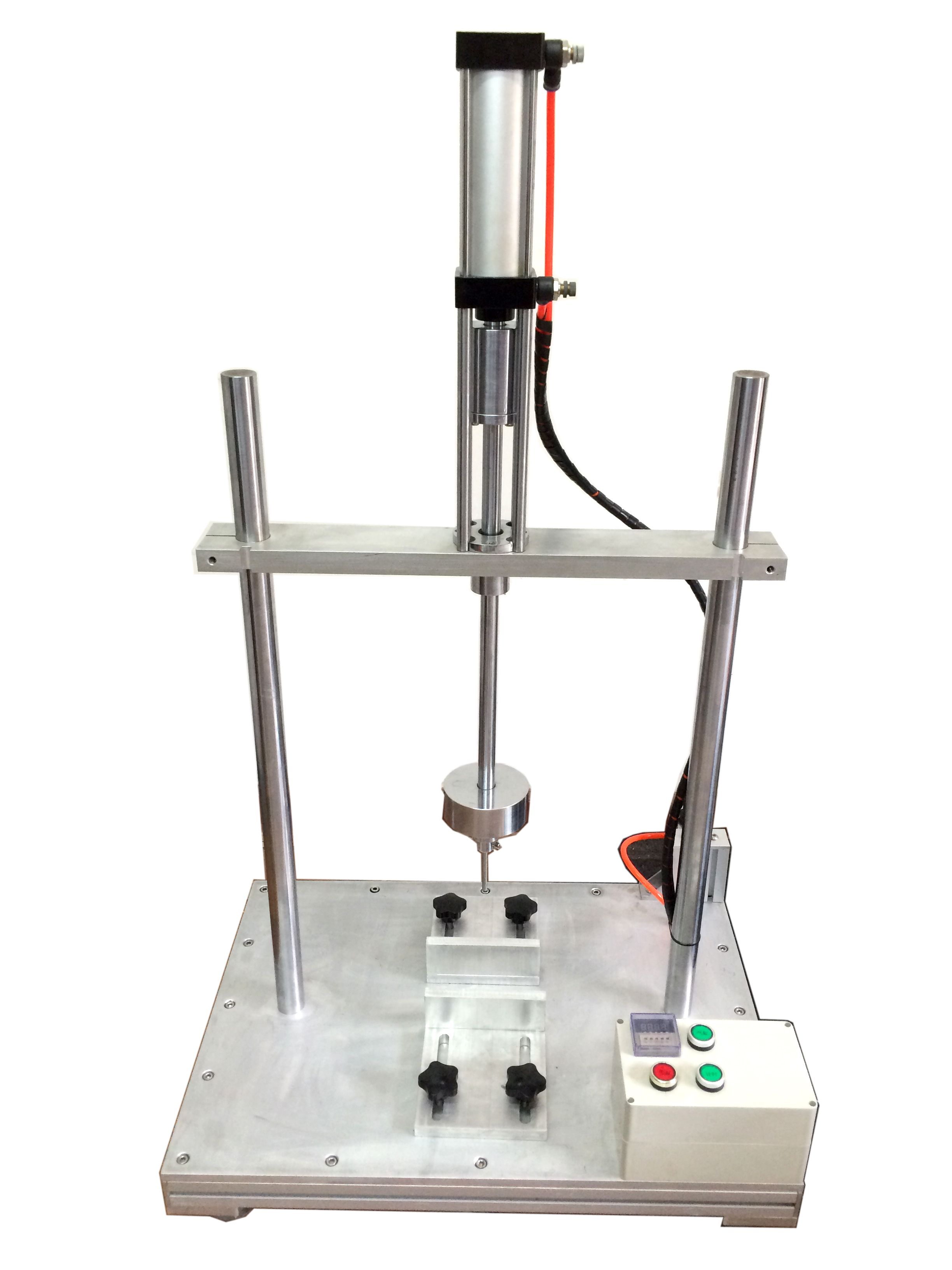
安全帽撞击试验机

- 产品名称:安全帽撞击试验机装置_GB2811冲击试验机-东莞宏图仪器有限公司
- 产品价格:面议
- 产品数量:50
- 保质/修期:1
- 保质/修期单位:年
- 更新日期:2019-11-18
产品说明
主机性能特点:
1、采用伺服马达,伺服控制器及其配套控制单元作为驱动组件,马达寿命长.
2、采用中空式齿轮减速系统,功耗小、噪音低、效率高、可靠性强.
3、采用中泰数据采集卡,使试验机精度保持长期不变.
4、采用直插式传动装置使定位精度高,寿命长,低摩擦,可高速运转及正逆向转动,使整机运行平移,位移,速度精度大大提高.
5、具有位置限制功能,使某些有位置限制要求的试验更安全快捷.
6、极宽的测量范围,适用多个国家的标准.
7、采用一体化设计原理,无论主机的配置如何,修改电脑相应参数(参数可永久保留),无需进行电路调整.
8、高精度回位定位功能,无论回位速度如何,都可精密返回起始位置,加快试验速度,提高工作效率.
9、常用参数记忆功能,如试验速度等,使一开机就处于这个参数状态,极大的方便了用户.
10、操作灵活方便, 具有常动和点动两种工作模式,用户可方便的自由设置,以适应不同的场合或习惯.
11、具有多种保护功能:可调整的上下限位保护、急停保护等
特别注意事项:本页面报价仅供参考,东莞宏图仪器有限公司,宏图仪器,以客户来电确认所需为准。
因客户需求不同,同一设备可满足不同标准如ECE、GB811、DOT、GB24429、EN1077、EN1078等标准,每标准的所用设备配件不同,价格也不同。
传统的神经网络路径规划方法往往是建立一个关于机器人从初始位置到目标位置行走路径的神经网络模型,模型输入是传感器信息和机器人前一位置或者前一位置的运动方向,通过对模型训练输出机器人下一位置或者下一位置的运动方向。可以建立基于动态神经网络的机器人避障算法,动态神经网络可以根据机器人环境状态的复杂程度自动地调整其结构,实时地实现机器人的状态与其避障动作之间的映射关系,能有效地减轻机器人的运算压力。还有研究通过使用神经网络避障的同时与混合智能系统(HIS)相连接,可以使移动机器人的认知决策避障能力和人相近。 公司的航天高科技产品主要包括:高性能传感器、无线电测量控制系统、特种电子通信、自动跟踪系统和数据收集、传输处理系统、卫星电视广播系统,数字化有线电视网络设备,卫星通信地球站,星上精密机构及结构部件,大型地面工程业务测控站和电子支持设备,以及火箭、卫星、舰船、飞机、核能等产品配套使用的各种电连接器、继电器、电子仪器设备、电缆网及开关设备,GPS/GLONASS/北斗卫星导航应用系统及终端设备等,被广泛地应用于各类型号卫星、火箭运载工具、相应的地面通信测量与控制设备及工业自动化控制设备中。 结合当前船企在数字化工艺设计、建造水平以及生产车间智能化方面的现状,林忠钦建议,我国船舶工业在推进船舶智能制造的过程中,安全帽撞击试验机装置,中国工业冲击试验机制作,可通过“三步走”方案,分步实施、逐渐推进。第一步,到年,建成智能车间,使造船效率和质量水平接近日韩船企;第二步,到2025年,实现全面信息集成与大数据应用,构建数字化虚拟船厂,并形成智能船厂应用示范与模式,建成智能船厂,安全帽撞击试验机装置,中国工业冲击试验机商家,促使造船效率和质量水平赶超日韩;第三步,安全帽撞击试验机装置,工业冲击试验机制作,搭建船舶智能制造联盟,引领技术进步与创新。头盔安全帽撞击试验机定做_头盔冲击试验机厂家直销-东莞宏图仪器有限公司
供应商信息