欢迎访问深圳旭达通智能科技有限公司的网站
欢迎访问深圳旭达通智能科技有限公司的网站

- 公司名称:深圳旭达通智能科技有限公司
- 联系人:刘延
- 手机:13418885103
- 公司地址:广东省深圳市龙岗区龙城街道京基御景时代大厦南区4楼
5.8G雷达

- 产品名称:北京5.8G雷达雷达厂家_智能家电探头、感应器-深圳旭达通智能科技有限公司
- 产品价格:面议
- 产品数量:99999
- 保质/修期:1
- 保质/修期单位:年
- 更新日期:2021-02-16
产品说明
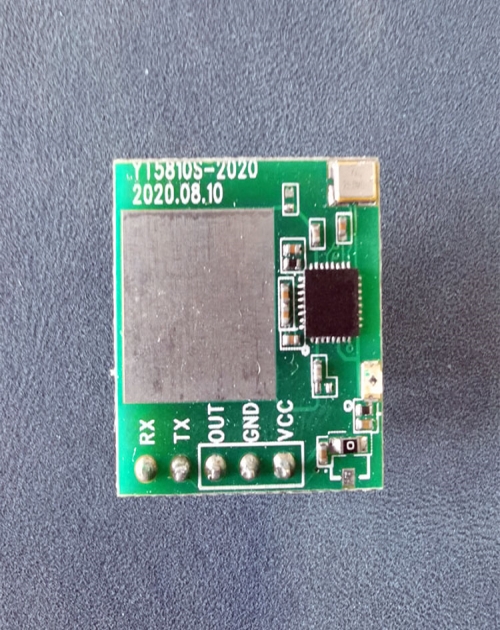
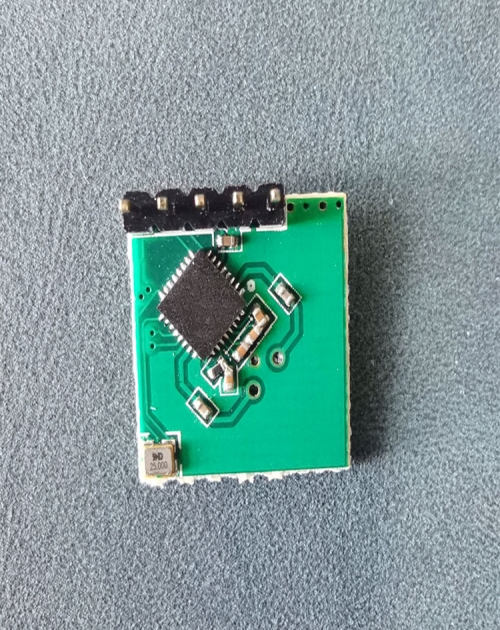
软件配置上,RX和TX可作为I/O口或当作UART口来调谐模块参数,软件默认将这两个PIN作为I/O口,其中TX用来调谐感应距离,TX为低电平时感应距离4~6米,为高电平时感应距离3~5米;RX用来调谐延迟时间,RX为低电平时感应延迟时间为30S,为高电平时延迟时间2S,在延迟时间内再次触发感应,会重新开始计时!模块上电时序图模块有上电自检功能,即模块上电后,OUT脚先输出高电平,延迟1S后输出低电平,低电平延迟1S后进入正常感应模式,以下是模块上电后控制信号的时序图:探测范围示意图雷达传感器的感应灵敏度可通过MCU来配置,其极限感应距离8米,实际感应距离可根据需要适当调节!

路灯雷达传感器定制_太阳能灯光电传感器厂家-深圳旭达通智能科技有限公司
6、感应距离可以做到多远?雷达的感应距离和天线的性能关系很大,同样的芯片不同的天线设计最终的感应距离会有差异!另外测试的方法和环境也会对感应距离有影响,如正面感应和挂高感应的距离就会有差距.关于我们参考设计板子的感应距离,请结合实际需要的应用场景等信息咨询技术支持人员.7、雷达感应波形大小和什么有关?感应波形和很多因素有关,雷达自身方面如发射功率,天线效率,接收增益等.在雷达自身条件固定条件下,感应到的波形大小和运动物体的大小成正比;和运动物体与雷达之间的距离成反比;另外和环境也有一定关系,狭窄的空间信号多反射,相对空旷的空间感应到的信号会大一些!
雷达模块几个常用问题:1、模块是否穿墙?玻璃对他影响大不大?一般来说发射功率越大穿墙的概率就会越大.实测当中发现,雷达模块几乎不会穿实体水泥墙,如果是隔板墙,发射功率较大的情况下会穿!普通玻璃影响不太大,会有点,但如果里面含有金属等导电性质的会有大幅的削落效果,不建议使用!2、模块测试距离的误差一般是多少?+/-10%左右,比如设置5m感应距离,测试效果一般是在4。5m~5!5m!3、目前的雷达模块感应角度是怎样的?为什么模块背后的感应距离还比较远?(1)雷达的感应角度其实取决于采用什么样的天线形态、这个可以根据使用场景来选择天线形态;就目前常用的平面天线来讲、感应强的区域位于天线面前方120°的扇形范围(2)一般室内的空间存在反射,会导致模块背后的感应距离会相对远一些;但在室外环境下,这个情况会有所减弱!
5!8G微波雷达传感器模块优势对比1,与红外感应的对比红外感应的劣势:A、感应距离近,有盲区;B、受环境温度的影响(37度时无效);C、容易因被灰尘等遮挡而失灵;D、无穿透性,需外露在产品外面,影响产品外观.5!8G微波雷达模块的优势:A、感应距离远,角度广;B、不易受环境影响,适应性强;C、5.8G微波穿透性强,可穿透除金属外的大部分材料;D、可安装在产品内部,不影响产品外观!2、与同类产品的对比(5!
北京5.8G雷达雷达厂家
4、人走动快慢,测试的感应距离差异很大,为什么?人走动速度的快慢,产生的多普勒频移不同,速度快的频率较高,在我们默认的滤波方案中被滤除较多,故感应相对不灵敏!后续芯片方案在开发FFT算法,可以保留更多的有用信号。5、不同模块测试时感应距离有差异,为什么?测试人员的身高体态在微波雷达上产生的RCS不同;感应触发在算法中会做滤波处理以避免突发性的干扰,故不同模块和人员测试时可能测试结果有差异,但一般差异不会太大!
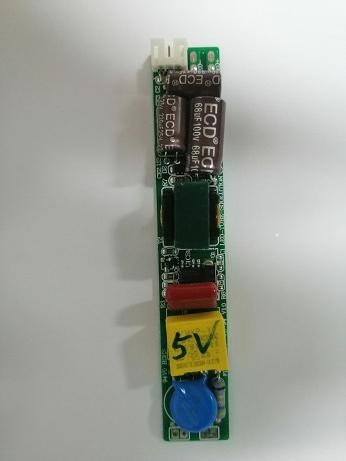
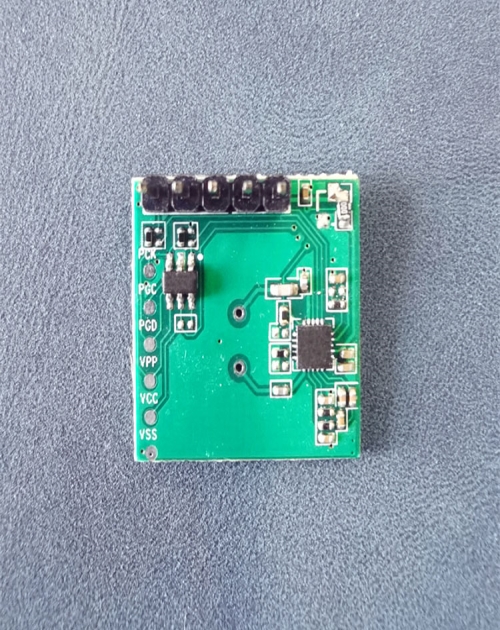
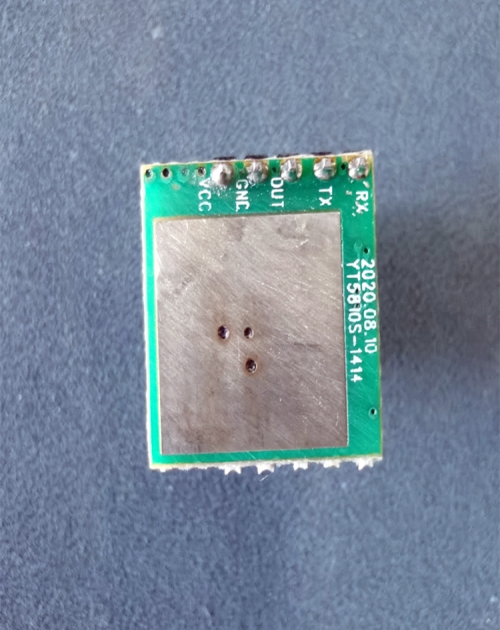
8、在某些环境下模块的发热效果很严重,是否会影响性能?芯片有做过高温测试,在80℃的情况下工作基本不会受影响.一般在5V供电的情况下,特别是在球泡灯上面热的特别厉害,但是老化测试下来性能基本上不会受影响.如果模块板子上面有额外输入的LDO,那么会增加板子的温度,温度一高可能会影响模块LDO的供电等情况,从而导致模块工作异常:常亮或无感应的现象发生.针对这个问题,可以通过选用散热好的LDO来改善。输入输出接口模块预留5个插座,PIN距为2!
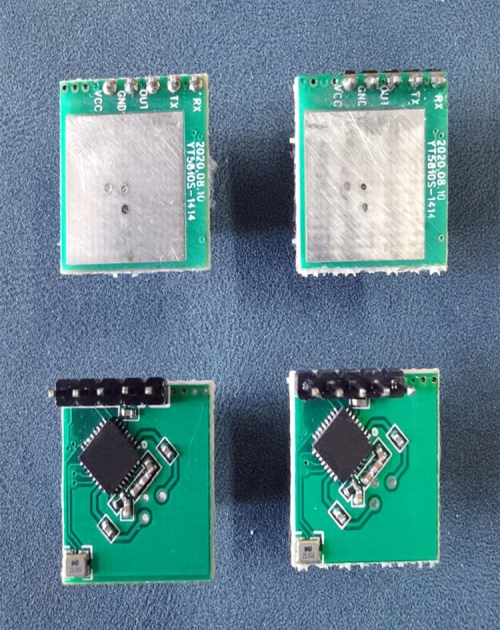
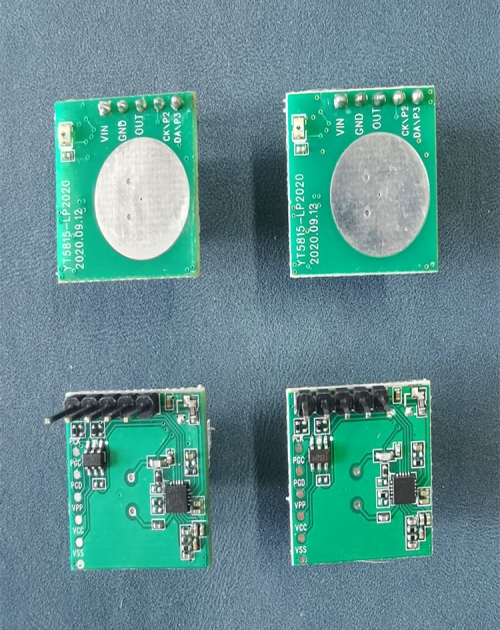
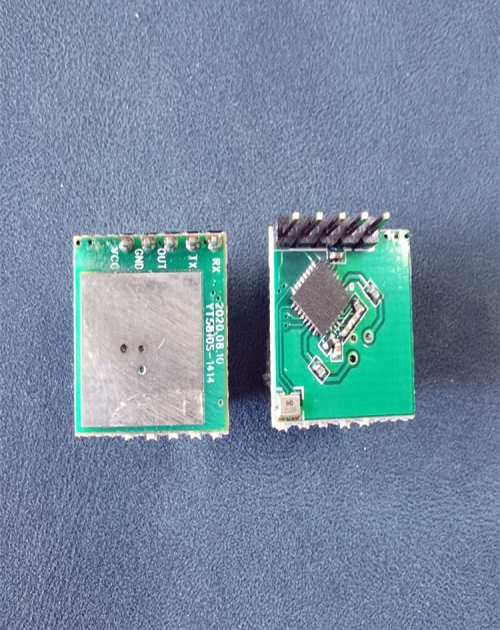
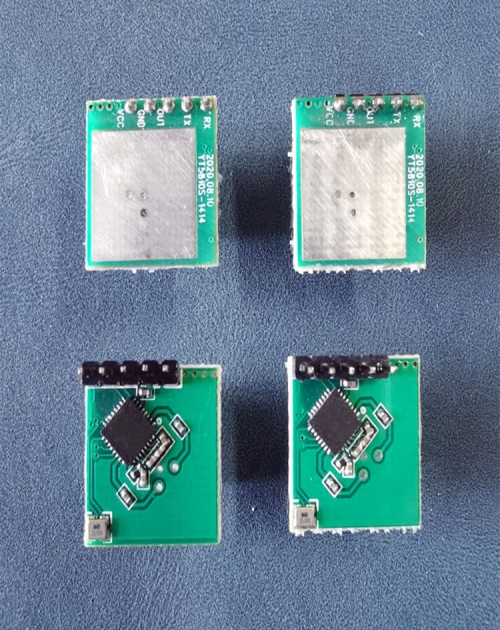
0mm,默认使用VCC、GND和OUT三个PIN,如需调谐距离和延迟时间等参数,可通过串口RX和TX来灵活配置,对于没有上位机的场景,也可把RX和TX作为I/O口来调节参数,下表是各PIN脚定义说明:模块尺寸及插针位置下图2是模块的尺寸及插针位置示意图,模块长宽为14mm*14!5mm,出厂默认不配插针,整体厚度为2.0mm,如果需要带插针,则默认插针高度为12mm!感应时间及感应距离调节P1414默认需要3个插针,分别是VCC、GND和OUT,此时感应延时和感应距离为固定值,如需调节感应延时和感应距离等相关参数,硬件上需要增加图3所示RX和TX两个PIN引出来!
孔径合成雷达可以作为战斗机载雷达吗?
一般来说主要作为地形测绘和侦查所用,大型飞机和小型飞机都能安装,现在先进的战斗机相控阵火控雷达如APG-77将提供合成孔径的功能
请问气象雷达和搜索雷达有什么区别?
*气象雷达与搜索雷达类似,但使用圆极化波以及水滴易于反射的波长
雷达手表怎么样,雷达手表好吗
手表没有好坏,要看做工
052c的雷达能升级成有源相控阵雷达?
是有的呀。
1473雷达怎么样
我给找一下。长见识了。
什么是热雷达?
实际上就是红外热像仪。专业的军事术语中没有这个说法。 一些媒体把“雷达”的意义扩展为“能够发现、探测目标”,因此把利用热来发现目标的红外热像仪称作“热雷达”。这与“情场杀手”之类的词差不多。
为什么我的股市雷达不显示呀
好多都显示不出来。股市雷达没有什么用处,别信。
相控阵雷达与普通的机械雷达有什么不同和优势
相控阵雷达的优点(1)波束指向灵活,能实现无惯性快速扫描,数据率高;(2)一个雷达可同时形成多个独立波束,分别实现搜索、识别、跟踪、制导、无源探测等多种功能; (3)目标容量大,可在空域内同时监视、跟踪数百个目标; (4)对复杂目标环境的适应能力强; (5)抗干扰性能好。
全固态相控阵雷达的可靠性高,即使少量组件失效仍能正常工作。 雷达扫描目标的方式分为两种。*种:雷达在搜索目标时,需要不断改变波束的方向。改变波束方向的传统方法是转动雷达天线,使波束扫过一定的空域、地面或海面,这种方式称为机械扫描。第二种:雷达天线阵面上排列着成百上千个阵元,每个阵元都能发射和接收雷达脉冲。
通过计算机控制每个单元脉冲的相位和振幅,可以确定雷达整体波束的形状和方向,以这样方式进行的扫描,称为电扫描。接收单元将收到的雷达回波信号送入主机进行计算,完成雷达的搜索、跟踪和测量任务。这就是相控阵技术。 。
全固态相控阵雷达的可靠性高,即使少量组件失效仍能正常工作。 雷达扫描目标的方式分为两种。*种:雷达在搜索目标时,需要不断改变波束的方向。改变波束方向的传统方法是转动雷达天线,使波束扫过一定的空域、地面或海面,这种方式称为机械扫描。第二种:雷达天线阵面上排列着成百上千个阵元,每个阵元都能发射和接收雷达脉冲。
通过计算机控制每个单元脉冲的相位和振幅,可以确定雷达整体波束的形状和方向,以这样方式进行的扫描,称为电扫描。接收单元将收到的雷达回波信号送入主机进行计算,完成雷达的搜索、跟踪和测量任务。这就是相控阵技术。 。
2月23日,海马宣布向市场推出M6的1.6L车型,新车型共有两款选择,售价分别为6.98万和7.98万元。海马M6 1.6L两款车型 指导售价车型售价(万元)1.6L MT 舒适型6.981.6L MT 运动智能型7.98 相比现款在售的1.5T车型,新增的海马M6 1.6L车型进一步拉低了该车系的价格区间,新车型搭载的是1.6L自然吸气发动机,最大输出功率为118马力(86.5kW),峰值扭矩为156N·m,传动部分匹配5速手动变速箱。 配置方面,海马M6 1.6L车型标配了后排座椅4/6折叠、后排座椅中央扶手、带加热功能的外后视镜、防眩目内后视镜、倒车雷达;高配的运动智能型则额外具有自动空调、皮质座椅、电动天窗、GPS导航、8英寸显示屏、真皮方向盘、电子车身稳定系统、倒车影像、前排侧气囊、远程自助寻车、互联网娱乐交互系统等。
供应商信息