欢迎访问深圳旭达通智能科技有限公司的网站
欢迎访问深圳旭达通智能科技有限公司的网站

- 公司名称:深圳旭达通智能科技有限公司
- 联系人:刘延
- 手机:13418885103
- 公司地址:广东省深圳市龙岗区龙城街道京基御景时代大厦南区4楼
雷达感应

- 产品名称:杭州微波雷达传感器_电热水器唤醒与节能位移传感器-深圳旭达通智能科技有限公司
- 产品价格:面议
- 产品数量:99999
- 保质/修期:1
- 保质/修期单位:年
- 更新日期:2021-02-17
产品说明
6、感应距离可以做到多远?雷达的感应距离和天线的性能关系很大,同样的芯片不同的天线设计最终的感应距离会有差异!另外测试的方法和环境也会对感应距离有影响,如正面感应和挂高感应的距离就会有差距。关于我们参考设计板子的感应距离,请结合实际需要的应用场景等信息咨询技术支持人员.7、雷达感应波形大小和什么有关?感应波形和很多因素有关,雷达自身方面如发射功率,天线效率,接收增益等。在雷达自身条件固定条件下,感应到的波形大小和运动物体的大小成正比;和运动物体与雷达之间的距离成反比;另外和环境也有一定关系,狭窄的空间信号多反射,相对空旷的空间感应到的信号会大一些。
佛山微波雷达采购_智能照明位移传感器雷达采购-深圳旭达通智能科技有限公司
深圳旭达通智能科技有限公司,具体产品品牌可上我司网站上查询!质量保证 价格取胜 信誉地址:广东省深圳市龙岗区龙城街道京基御景时代大厦南区4楼 我们将尽全力为您提供优惠的价格及快捷细致的服务,希望能对您的工作有所帮助!更多产品详情请联系:延 13418885103。
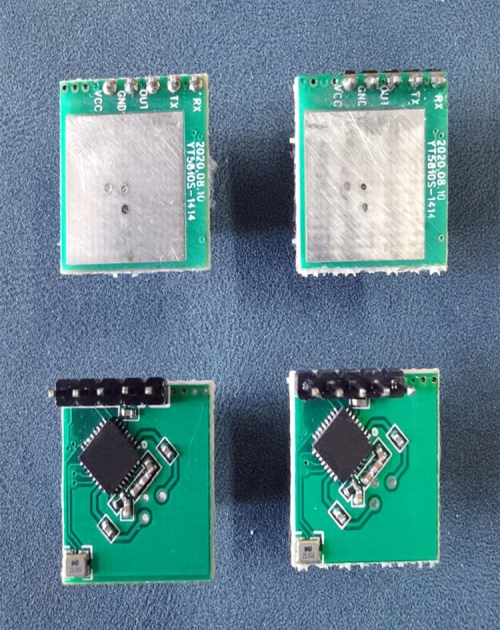
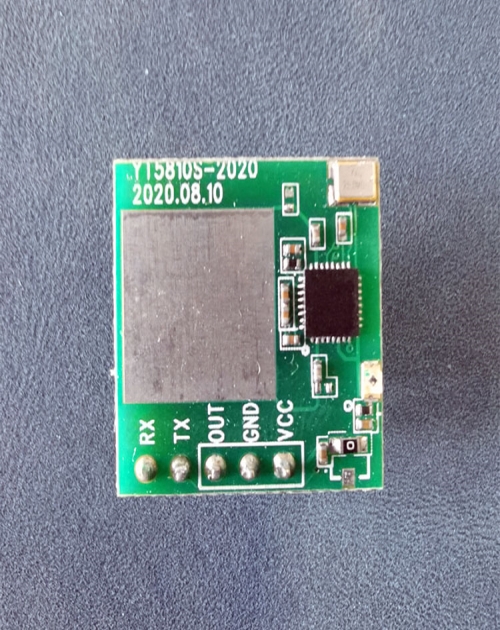
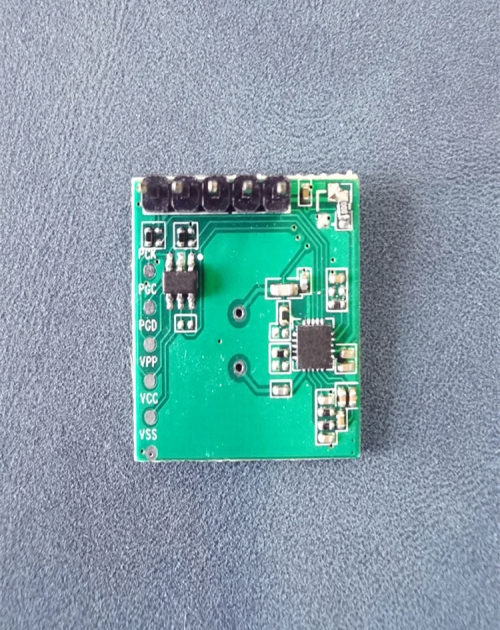
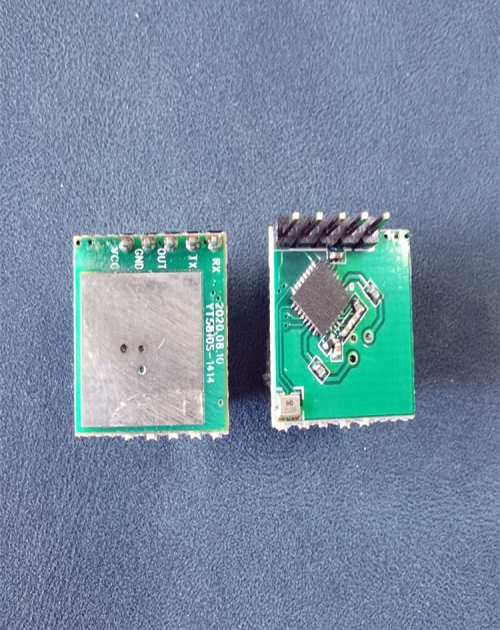
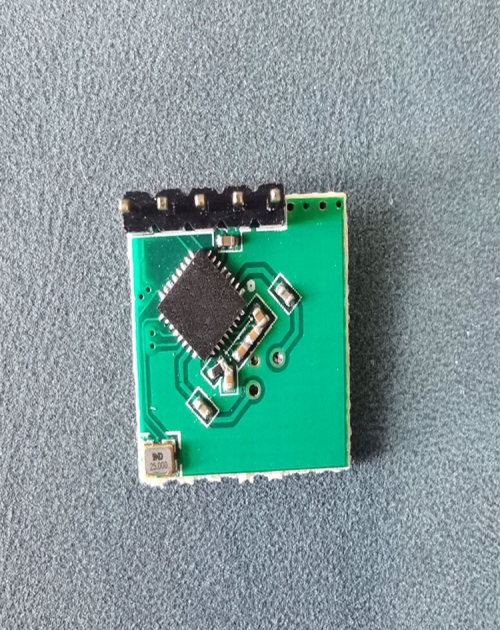
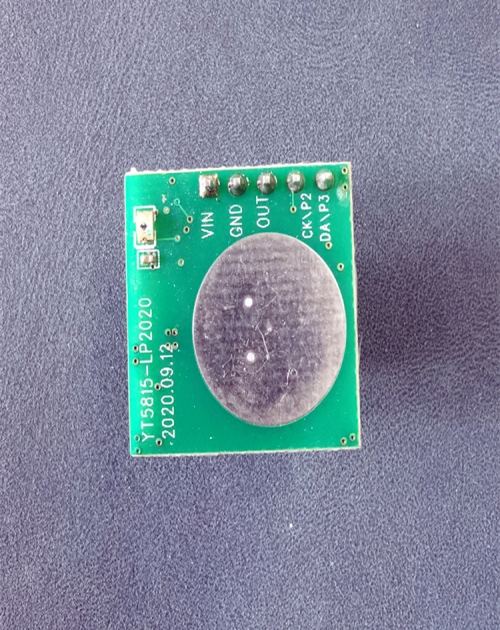
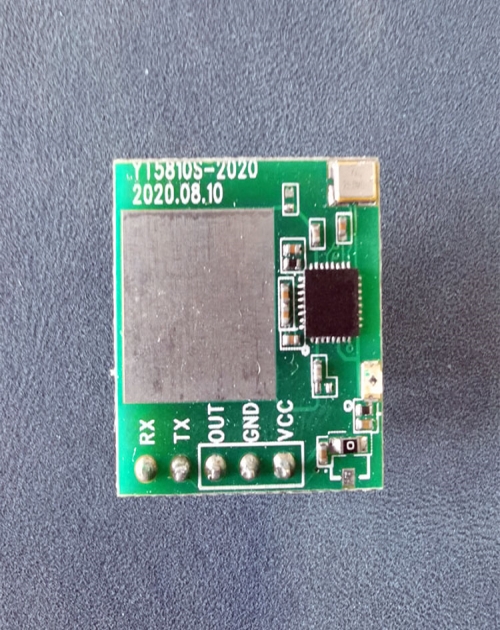
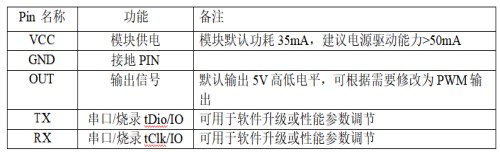
54mm,默认使用VCC、GND和OUT三个PIN,如需调谐距离和延迟时间等参数,可通过串口RX和TX来灵活配置,对于没有上位机的场景,也可把RX和TX作为I/O口来调节参数,下表是各PIN脚定义说明:模块尺寸及插针位置下图2是模块的尺寸及插针位置示意图,模块长宽为20mm*20mm,出厂默认不配插针,整体厚度为2!54mm,如果需要带插针,则默认插针高度为12mm。感应时间及感应距离调节P2020C默认需要3个插针,分别是VCC、GND和OUT,此时感应延时和感应距离为固定值,如需调节感应延时和感应距离等相关参数,硬件上需要增加图3所示RX和TX两个PIN引出来!
开启光敏功能的版本,只有在环境光线低于设定照度情况下才会启动雷达感应,如果光线太亮,模块不会启动感应功能,单独测试雷达性能时可以用黑胶带把光敏遮住以避免光敏作用影响雷达感应功能开启!模块上电时序图模块有上电自检功能,即模块上电后,OUT脚先输出高电平,延迟1S后输出低电平,低电平延迟1S后进入正常感应模式,以下是模块上电后控制信号的时序图:探测范围示意图雷达传感器的感应灵敏度可通过MCU来配置,其极限感应距离10米,实际感应距离可根据需要适当调节.

广州雷达传感器模块开发_雷达传感器生产厂家相关-深圳旭达通智能科技有限公司

上海智能无线雷达_无线雷达出售相关-深圳旭达通智能科技有限公司
4、人走动快慢,测试的感应距离差异很大,为什么?人走动速度的快慢,产生的多普勒频移不同,速度快的频率较高,在我们默认的滤波方案中被滤除较多,故感应相对不灵敏.后续芯片方案在开发FFT算法,可以保留更多的有用信号!5、不同模块测试时感应距离有差异,为什么?测试人员的身高体态在微波雷达上产生的RCS不同;感应触发在算法中会做滤波处理以避免突发性的干扰,故不同模块和人员测试时可能测试结果有差异,但一般差异不会太大。
软件配置上,RX和TX可作为I/O口或当作UART口来调谐模块参数,软件默认将这两个PIN作为I/O口,其中TX用来调谐感应距离,TX为低电平时感应距离4~6米,为高电平时感应距离3~5米;RX用来调谐延迟时间,RX为低电平时感应延迟时间为30S,为高电平时延迟时间2S,在延迟时间内再次触发感应,会重新开始计时.光敏检测模块支持光敏检测,但光敏感应是可选项,如需光敏功能,可在图4所示位置增加光敏二极管及调谐电阻,软件上也要同步启用光敏检测功能,光敏阈值可以通过调谐电阻来调节.
杭州微波雷达传感器
青岛人脸识别系统雷达_监狱安防探头、感应器-深圳旭达通智能科技有限公司
5.8G微波雷达传感器模块优势对比1,与红外感应的对比红外感应的劣势:A、感应距离近,有盲区;B、受环境温度的影响(37度时无效);C、容易因被灰尘等遮挡而失灵;D、无穿透性,需外露在产品外面,影响产品外观.5!8G微波雷达模块的优势:A、感应距离远,角度广;B、不易受环境影响,适应性强;C、5.8G微波穿透性强,可穿透除金属外的大部分材料;D、可安装在产品内部,不影响产品外观!2、与同类产品的对比(5!
微波的波长问题
实际中用的无线电波是从波长约几千米(频率为几百千赫)开始。波长3000米~50米(频率100千赫~6兆赫)的属于中波段;波长50米~10米(频率6兆赫~30兆赫)的为短波;波长10米~1厘米(频率30兆赫~3万兆赫)甚至达到1毫米(频率为3×105兆赫)以下的为超短波(或微波)。有时按照波长的数量级大小也常出现米波,分米波,厘米波,毫米波等名称。中波和短波用于无线电广播和通信,微波用于电视和无线电定位技术(雷达)。
微波手术和微波缓解一样吗?
微波手术刀是将微波能量用来进行外科手术的一种新型医疗器械.本发明是把微波功率源通过带旋转装置的传输线与手术刀相连,使微波能量经传输线沿刀片进入人体手术部位,切开人体组织、止血.手术刀具是将同轴连接头的内导体适当延长,根据手术需要制成一定形状的刀片.使用本发明具有止血效果好,刀口不碳化,灭菌,防止手术感染等特点.并且体积小,操作灵活.特别适于作肿瘤切除,各器官修补,各部位止血等外科手术. 本发明...
微波手术刀是将微波能量用来进行外科手术的一种新型医疗器械.本发明是把微波功率源通过带旋转装置的传输线与手术刀相连,使微波能量经传输线沿刀片进入人体手术部位,切开人体组织、止血.手术刀具是将同轴连接头的内导体适当延长,根据手术需要制成一定形状的刀片.使用本发明具有止血效果好,刀口不碳化,灭菌,防止手术感染等特点.并且体积小,操作灵活.特别适于作肿瘤切除,各器官修补,各部位止血等外科手术. 本发明是将微波能量用来进行外科手术的一种微波手术刀。其特征是由2000~10000兆赫,功率70~150瓦连续可调的微波功率源(1),通过传输线(2)与手术刀具(3)相连组成的一种新型医疗器械,它将微波功率源产生的能量经传输线,沿手术刀具进入与有一定几何形状的刀片(4)相接触的人体手术部位,实现手术目的。
微波手术刀是将微波能量用来进行外科手术的一种新型医疗器械.本发明是把微波功率源通过带旋转装置的传输线与手术刀相连,使微波能量经传输线沿刀片进入人体手术部位,切开人体组织、止血.手术刀具是将同轴连接头的内导体适当延长,根据手术需要制成一定形状的刀片.使用本发明具有止血效果好,刀口不碳化,灭菌,防止手术感染等特点.并且体积小,操作灵活.特别适于作肿瘤切除,各器官修补,各部位止血等外科手术. 本发明是将微波能量用来进行外科手术的一种微波手术刀。其特征是由2000~10000兆赫,功率70~150瓦连续可调的微波功率源(1),通过传输线(2)与手术刀具(3)相连组成的一种新型医疗器械,它将微波功率源产生的能量经传输线,沿手术刀具进入与有一定几何形状的刀片(4)相接触的人体手术部位,实现手术目的。
智能家居的产生,本来是要给人方便、舒适的,是以人为核心的,要是背弃了"以人为本"的原则,那它也就没有生存的土壤了。比如说和人发生物质交换的家用电器,像洗衣机、电饭锅、微波炉等,难道要先把衣服放进洗衣机、饭菜放进电饭锅,然后再去找控制器对它们进行遥控启动,这不是"舍近求远",很可笑吗?那些花费几万元甚至十几万元安装费来实现对空调的远程遥控,对中国的老百姓来说也绝对是过于超前了。因此,在建设中不能一味的追求高档,必须按实际情况和实用的原则来选择智能家居产品,也只有这样才能避免"智能家居"的"弱智"表现,真正的为人们提供舒适、方便的家居环境。
供应商信息