欢迎访问深圳旭达通智能科技有限公司的网站
欢迎访问深圳旭达通智能科技有限公司的网站

- 公司名称:深圳旭达通智能科技有限公司
- 联系人:刘延
- 手机:13418885103
- 公司地址:广东省深圳市龙岗区龙城街道京基御景时代大厦南区4楼
5.8G微波雷达
- 您当前的位置:
- 首页>
- 产品中心 >5.8G微波雷达 >中山商场雷达传感器批发-深圳旭达通智能科技有限公司
- 产品名称:中山商场雷达传感器批发-深圳旭达通智能科技有限公司
- 产品价格:面议
- 产品数量:100000
- 保质/修期:1
- 保质/修期单位:年
- 更新日期:2021-02-20
产品说明
5V~5V,工作电流50-80uA,可电池供电Ø工作频率:5!8GHz±75MHz,ISM频段Ø感应距离0!5m~10m可调,支持光敏功能各类人体感应类微波毫米波传感器对比Ø符合FCC/CE/RS以及SRRC等国内国际认证标准几个常用问题:1、模块是否穿墙?玻璃对他影响大不大?一般来说发射功率越大穿墙的概率就会越大。实测当中发现,雷达模块几乎不会穿实体水泥墙,如果是隔板墙,发射功率较大的情况下会穿.
东莞物联网雷达开关定做_雷达开关生产厂家相关-深圳旭达通智能科技有限公司
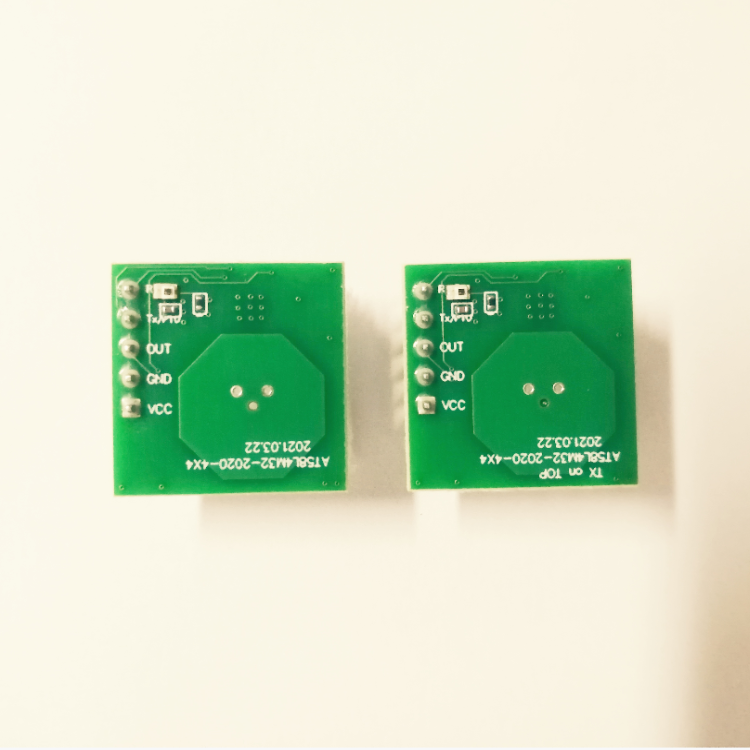
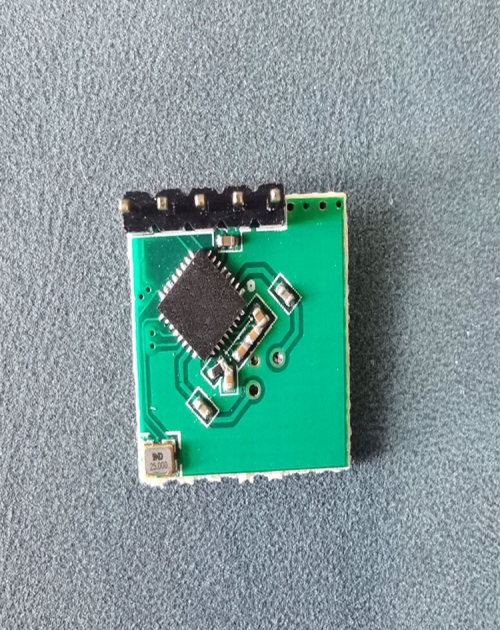
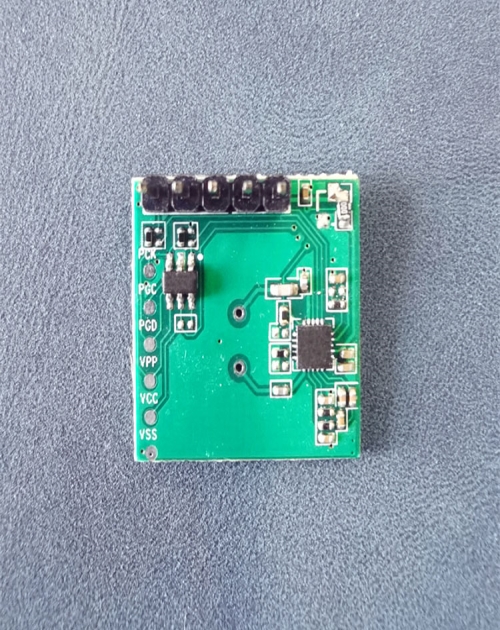
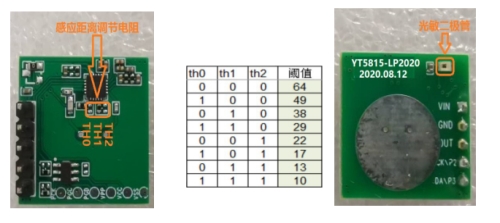
光敏检测模块支持光敏检测,但光敏感应是可选项,如需光敏功能,可在图4所示位置增加光敏二极管及调谐电阻,软件上也要同步启用光敏检测功能,光敏阈值可以通过调谐电阻来调节。开启光敏功能的版本,只有在环境光线低于设定照度情况下才会启动雷达感应,如果光线太亮,模块不会启动感应功能,单独测试雷达性能时可以用黑胶带把光敏遮住以避免光敏作用影响雷达感应功能开启!模块上电时序图模块有上电自检功能,即模块上电后,OUT脚先输出高电平,延迟1S后输出低电平,低电平延迟1S后进入正常感应模式,以下是模块上电后控制信号的时序图:探测范围示意图雷达传感器的感应灵敏度可通过MCU来配置,其极限感应距离10米,实际感应距离可根据需要适当调节.
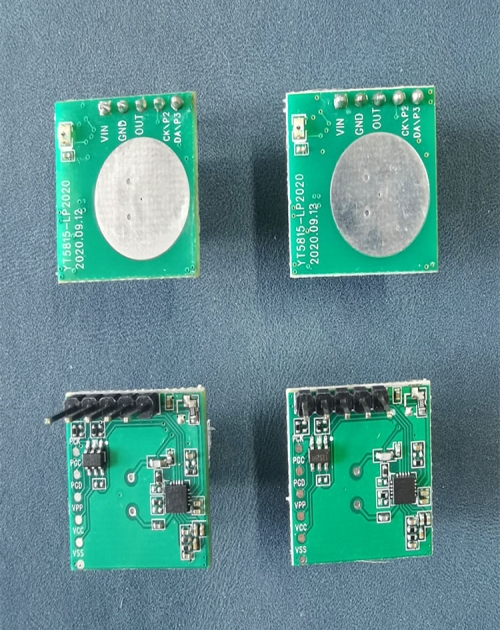
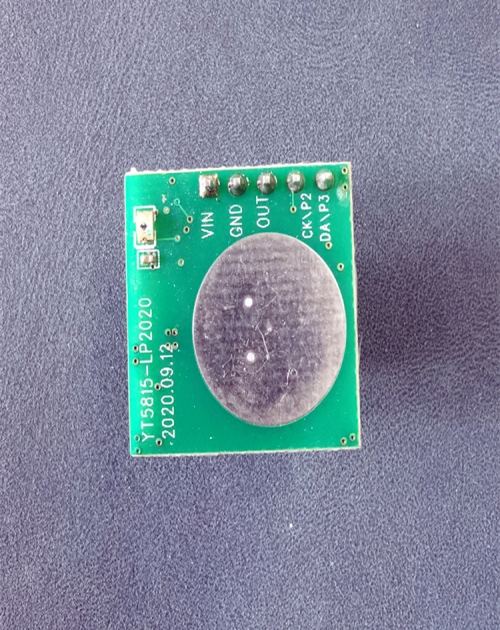
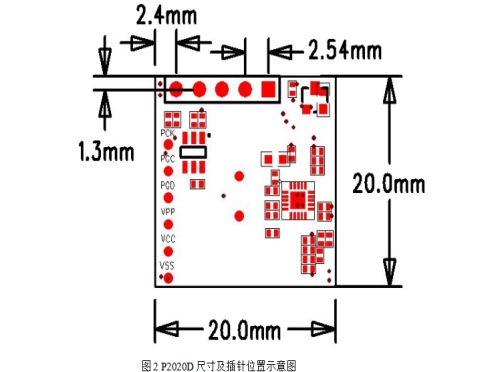
54mm,如需调谐距离和延迟时间等参数,可通过P2,P3的悬空或拉低状态配合模块上特定电阻来选择相应档位或者用模块上预留的外置MCU来改写内部参数,下表是各PIN脚定义说明:模块尺寸及插针位置下图2是模块的尺寸及插针位置示意图,模块长宽为20mm*20mm,出厂默认不配插针,整体厚度为2!54mm,如果需要带插针,则默认插针高度为12mm.电气参数:感应时间及感应距离调节P2020D模块上P2,P3pin针用于选择不同的感应距离和延时档;P2用于感应距离的调节,配合模块上预留的3个电阻(th0,th1,th2)可提供16档不同的感应距离选择.
4、人走动快慢,测试的感应距离差异很大,为什么?人走动速度的快慢,产生的多普勒频移不同,速度快的频率较高,在我们默认的滤波方案中被滤除较多,故感应相对不灵敏.后续芯片方案在开发FFT算法,可以保留更多的有用信号.5、不同模块测试时感应距离有差异,为什么?测试人员的身高体态在微波雷达上产生的RCS不同;感应触发在算法中会做滤波处理以避免突发性的干扰,故不同模块和人员测试时可能测试结果有差异,但一般差异不会太大.
6、感应距离可以做到多远?雷达的感应距离和天线的性能关系很大,同样的芯片不同的天线设计最终的感应距离会有差异.另外测试的方法和环境也会对感应距离有影响,如正面感应和挂高感应的距离就会有差距.关于我们参考设计板子的感应距离,请结合实际需要的应用场景等信息咨询技术支持人员。7、雷达感应波形大小和什么有关?感应波形和很多因素有关,雷达自身方面如发射功率,天线效率,接收增益等!在雷达自身条件固定条件下,感应到的波形大小和运动物体的大小成正比;和运动物体与雷达之间的距离成反比;另外和环境也有一定关系,狭窄的空间信号多反射,相对空旷的空间感应到的信号会大一些!
佛山人脸识别系统微波雷达模组_微波雷达价格相关-深圳旭达通智能科技有限公司

佛山人脸识别系统雷达开关安装_雷达开关相关-深圳旭达通智能科技有限公司
中山商场雷达传感器批发
普通玻璃影响不太大,会有点,但如果里面含有金属等导电性质的会有大幅的削落效果,不建议使用!2、模块测试距离的误差一般是多少?+/-10%左右,比如设置5m感应距离,测试效果一般是在4。5m~5!5m。3、目前的雷达模块感应角度是怎样的?为什么模块背后的感应距离还比较远?(1)雷达的感应角度其实取决于采用什么样的天线形态、这个可以根据使用场景来选择天线形态;就目前常用的平面天线来讲、感应强的区域位于天线面前方120°的扇形范围(2)一般室内的空间存在反射,会导致模块背后的感应距离会相对远一些;但在室外环境下,这个情况会有所减弱!
5.8G微波雷达传感器模块优势对比1,与红外感应的对比红外感应的劣势:A、感应距离近,有盲区;B、受环境温度的影响(37度时无效);C、容易因被灰尘等遮挡而失灵;D、无穿透性,需外露在产品外面,影响产品外观。5.8G微波雷达模块的优势:A、感应距离远,角度广;B、不易受环境影响,适应性强;C、5。8G微波穿透性强,可穿透除金属外的大部分材料;D、可安装在产品内部,不影响产品外观.2、与同类产品的对比(5。
智能驾驶中使用哪些雷达传感器?
智能车要实现在未知环境中的自主行驶,就必须具备在各 种环境中获得实时可靠的外部信息的能力。在国内外智能车开 发过程中,使用*多的环境感知传感器除了机器视觉外就是雷达。根据雷达波段的不同主要包括激光雷达、毫米波雷达和超 声波雷达。从美国的DAPAR挑战赛到中国的“智能车未来挑战赛”,几乎每一辆参赛的自主车都有激光雷达的身影,图26为智能车雷达传感器配置示意图,图中用矩形框标注的区域均 表示自主车使用各种类型的激光雷达,这其中包括单线激光雷 达、多线激光雷达、毫米波雷达等。
目前,激光雷达在智能车领域主要应用于障碍检测、动态 障碍检测识别与跟踪、路面检测、定位和导航、环境建模等方 面。激光雷达根据探测原理,可以分为单线(二维)激光雷达 和多线(三维)激光雷达,其中三维激光雷达可以分为单向多 线和三维全向激光雷达。
单线激光雷达只有一条扫描线,通过 旋转扫描得到一条线上的深度信息,如德国SICK光电设备公 司研发的LMS系列激光雷达;多线激光雷达通过多条扫描线 的旋转扫描,得到多条线上的深度信息,如德国IBEO公司的 LD ML激光雷达;三维全向激光雷达则扫描的是一个空间, 得到一个空间内的深度信息。
目前,激光雷达在智能车领域主要应用于障碍检测、动态 障碍检测识别与跟踪、路面检测、定位和导航、环境建模等方 面。激光雷达根据探测原理,可以分为单线(二维)激光雷达 和多线(三维)激光雷达,其中三维激光雷达可以分为单向多 线和三维全向激光雷达。
单线激光雷达只有一条扫描线,通过 旋转扫描得到一条线上的深度信息,如德国SICK光电设备公 司研发的LMS系列激光雷达;多线激光雷达通过多条扫描线 的旋转扫描,得到多条线上的深度信息,如德国IBEO公司的 LD ML激光雷达;三维全向激光雷达则扫描的是一个空间, 得到一个空间内的深度信息。
供应商信息