
 欢迎访问武汉索尔德测控技术有限公司的网站
欢迎访问武汉索尔德测控技术有限公司的网站
产品中心
- 您当前的位置:
- 首页>
- 产品中心
- >皮带机伸缩头定位控制系统
所有 |
皮带机伸缩头定位控制系统_皮带伸缩头定位系统


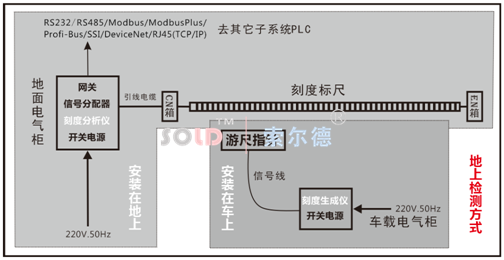
皮带机伸缩头定位控制系统物料在胶带机之间的交叉转运,通常是采用三通挡板和落煤溜槽进行切换,由于受到落煤溜槽角度的限制,因而建筑结构空间较高,落差大,粉尘诱导风量增加以及冲击较大,损坏胶带及缓冲托辊等,给工艺布置及运行上也带一些问题,特别对于三位置的交叉,不仅增加转运站的层数和层高,而且增加了胶带机的布置长度。近年来,在翻车机或卸煤装置地下转运站以及贮煤场转运站,分别采用了二位置和三位置的皮带机头部伸缩装置(简称皮带机伸缩头)进行胶带机之间的交叉,大限度的压缩了空间高度。根据工艺布置的要求,其使用部位有三处:1、卸煤装置与系统的交差;2、煤场胶带机与系统的交叉;3、系统与煤斗胶带机的交叉。皮带机头部伸缩装置(简称皮带机伸缩头)主要结构由伸缩头车架、走行轮、车架走行驱动装置、走行机架、悬挂托辊、承载托辊、悬挂托辊架、胶带机驱动装置、头部护罩与落煤斗、清扫器锚定装置所组成。车架上装有头部滚筒、改向滚筒、头部护罩、落煤斗、托辊,由驱动装置拖动沿轨道移动,进行交叉换位,达到系统交叉的目的。皮带伸缩头定位通常采用的定位技术是刻度标尺定位系统。刻度标尺定位系统采用法拉第电磁感应定律(磁力线传导原理)来检测移动搬运设备的位移量,当游尺指针线圈中通入交变电流时,在游尺指针附近会产生交变磁场。刻度标尺近似处在一个交变的、均匀分布的磁场中,每对刻度标尺芯线会产生感应电动势。刻度生成仪信号通过电磁耦合方式传送到刻度标尺的感应环线上。刻度分析仪对接收到的信号进行相位比较。交叉线的信号相位与平行线的信号相位相同,地址为“0”;交叉线的信号相位与平行线的信号相位相反,地址为“1”,这样感应的地址信息是数字编码排列,由此确定游尺指针在刻度标尺长度方向上的位置,对应就是移动搬运设备走行位置。
Copyright © 武汉索尔德测控技术有限公司